By the way, if the particular structure of the problem is typical of your needs, this is a QP problem (a quadratic cost function and linear equality constraints). As such it can be solved without a general optimization package just by using a solver for linear equations (look the KKT matrix up if you are not familiar with it, for example here).
Here comes a code
# Parameterization of the quadratic cost function 1/2 x'Qx + r'x + c
Q = [0.0 1.0; 1.0 0.0]
r = [1.0, 2.0]
c = 2.0
# Parameterization of the linear constraint Ax = b
A = [4.0 6.0]
b = 130
# KKT linear system
K = [hcat(Q,A'); hcat(A, 0)]
d = vcat(-r,b)
y = K\d
The maximum is at
julia> xopt = y[1:2]
2-element Vector{Float64}:
16.0
11.0
That this is truly a maximum can be verified by checking negativity of the projected Hessian, which in this case can be computed using
julia> Z = nullspace(A);
julia> Z'*Q*Z
1×1 Matrix{Float64}:
-0.923076923076923
We are lucky here because the Hessian of the uncostrained cost function is actually indefinite (the matrix Q has one positive and one negative eigval) and the unconstrained problem is unbounded. But for the contstrained problem we have a (unique and bounded) maximum.
Finally, some plots
# Plotting the cost function, the constraint and the optimal solution
using Plots
f(x₁,x₂) = (x₁+2)*(x₂+1)
x₁ = range(-100.0,200.0,length=500)
x₂ = range(-100.0,120.0,length=500)
plot(x₁,x₂,f,st=:surface,xlabel="x₁",ylabel="x₂",zlabel="f(x₁,x₂)")

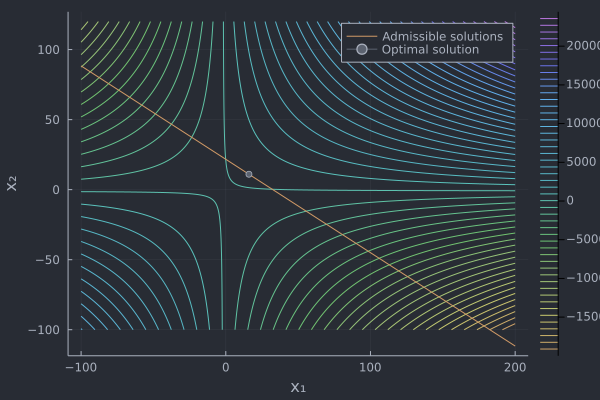
contour(x₁,x₂,f,xlabel="x₁",ylabel="x₂",levels=50)
x₂sol(x₁) = (130.0-4*x₁)/6
plot!(x₁,x₂sol,label="Admissible solutions")
plot!([y[1]],[y[2]],markershape=:circle,label="Optimal solution")