Im trying to formulate a parameter estimation problem to estimate the Resistance and Capacitance values of a 3 node thermal network. The thermal network is in the form of DAE with a mass matrix and exogenous inputs. I already have the temperature values of my 3 nodes as an interpolation function and im using it to estimate the loss of the then use Optimization.solve to solve the problem.
using DifferentialEquations, Interpolations,
Optimization, OptimizationPolyalgorithms, SciMLSensitivity,
Zygote, OptimizationOptimisers, OptimizationNLopt
using Plots
import XLSX
function thermal(du, u, p, t, P1, P2)
T1, T2, T3 = u
R_12, R_32, R_35, R_24, T4, T5 = p
du[1] = T2/R_12 - T1/R_12 + P1(t);
du[2] = T2/R_12 + T4/R_24 + T3/R_32 - T2*(1/R_12+1/R_24+1/R_32);
du[3] = T2/R_32 + T5/R_35 - T3*(1/R_32+1/R_35) + P2(t);
end
p=[0.5,0.2,0.1,0.05,30,30,1000,3000,2000];
M = [p[end-2] 0 0
0 p[end-1] 0
0 0 p[end]]
xf = XLSX.readxlsx(“Tempdat.xlsx”)
sh = xf[“Exp1”]
p1 = sh[“C5:C1804”]
p2 = sh[“D5:D1804”]
t1 = sh[“H5:H180004”]
t2 = sh[“I5:I180004”]
t3 = sh[“J5:J180004”]
d = 0.01:0.01:1800;
t = 1:1:1800;
tsteps = 0.1:0.1:1800
P1=LinearInterpolation(t,vec(p1’));
P2=LinearInterpolation(t,vec(p2’));
T1_s=LinearInterpolation(d,vec(t1’));
T2_s=LinearInterpolation(d,vec(t2’));
T3_s=LinearInterpolation(d,vec(t3’));
#experimental power and temperature values
u=[20,20,20];
tspan = (1,1800);
f = ODEFunction(thermal, mass_matrix = M)
prob_mm = ODEProblem(f, u, tspan, p)
sol = solve(prob_mm, Rodas5P(), saveat = 0.01, abstol=1e-8, reltol=1e-8)
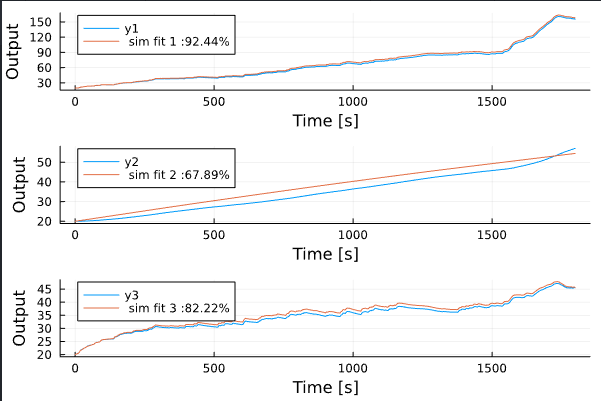
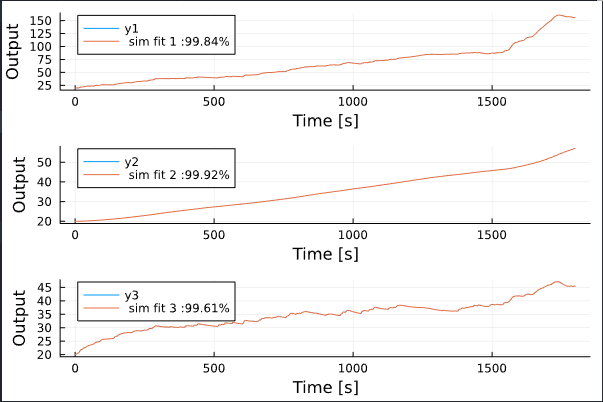
plot(sol);
function loss(p)
sol = solve(prob_mm, Rodas5P(), p=p, saveat = 0.01, abstol=1e-8, reltol=1e-8)
T1_hat = [u[1] for u in sol.u]
T2_hat = [u[2] for u in sol.u]
T3_hat = [u[3] for u in sol.u]T1_model = T1_s(sol.t) T2_model = T2_s(sol.t) T3_model = T3_s(sol.t) loss1 = sum(abs2, T1_model .- T1_hat) loss2 = sum(abs2, T2_model .- T2_hat) loss3 = sum(abs2, T3_model .- T3_hat) loss = loss1+loss2+loss3 return loss, solend
callback = function (p, l, pred)
display(l)plt = plot(pred)
display(plt)
# Tell Optimization.solve to not halt the optimization. If return true, then # optimization stops. return falseend
#adtype = Optimization.AutoZygote()
#adtype = Optimization.AutoReverseDiff()
adtype = Optimization.AutoForwardDiff()
optf = Optimization.OptimizationFunction((x, p) → loss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, p)result_ode = Optimization.solve(optprob, PolyOpt(), callback=callback, maxiters = 100)
I have tried with different AD solvers and different algorithms but this keeps throwing me
“ERROR: gradient of 180000-element extrapolate(scale(interpolate(::Vector{Any}, BSpline(Linear())), (0.01:0.01:1800.0,)), Throw()) with element type Float64:”
3node_thermal_network.jl (2.2 KB)