I wrote the below code (originally in MATLAB, ported to Julia). Unfortunately, the code runs at pretty much the same speed as the MATLAB original.
using LinearAlgebra
using StaticArrays
using DelimitedFiles
using BenchmarkTools
using Profile
using Plots
# --- Bond transform matrix
function BondMatrix2D(d)
b = [cosd(d) cosd(90 - d);
cosd(90 + d) cosd(d) ];
M1 = b.^2;
M2 = 2 * b[:, 2] .* b[:, 1];
M4 = b[1,1]*b[2,2] + b[1,2]*b[2,1]
M = [M1 M2;
-M2'/2 M4]
return M
end
# --- Decompose the C matrix ; as this is required repeatedly in AFmatrix and ds3ds1
function CMatrixDecomp(C)
DD = @views (C[2,3]^2-C[2,2]*C[3,3]);
CzziCzx =(@views[-(C[1,3]*C[2,2]-C[1,2]*C[2,3])/DD 1;
(C[1,3]*C[2,3]-C[1,2]*C[3,3])/DD 0]);
CxzCzzi = (@views [-(C[1,3]*C[2,2]-C[1,2]*C[2,3])/DD (C[1,3]*C[2,3]-C[1,2]*C[3,3])/DD;
1 0]);
CxxmCxzCzziCzx = (@views [(C[1,3]^2*C[2,2]-2*C[1,2]*C[1,3]*C[2,3]+C[1,1]*C[2,3]^2+C[1,2]^2*C[3,3]-C[1,1]*C[2,2]*C[3,3])/DD 0;
0 0]);
Czzi = @views inv([C[3,3] C[2,3];
C[2,3] C[2,2]]);
return CzziCzx,CxzCzzi,CxxmCxzCzziCzx,Czzi
end
# --- Creation of A (system) matrix
function AFmatrix(C,s1,rho,f,h,CzziCzx,CxzCzzi,CxxmCxzCzziCzx,Czzi)
A1 = -s1 * CzziCzx;
A2 = Czzi;
A3 = rho*I - s1^2*CxxmCxzCzziCzx;
A4 = -s1 * CxzCzzi;
A = [ A1 A2 ;
A3 A4];
F = @views [ CzziCzx*h[:,1]+h[:,2] ; f + s1 * CxxmCxzCzziCzx * h[:,1] ];
return A,F
end
# --- Computation of d(s3)/d(s1) derivative
function ds3ds1(C,D0,s1,N1,N2,CzziCzx,CxzCzzi,CxxmCxzCzziCzx,Czzi)
# --- The differentiated system matrix A
dAds = [-CzziCzx zeros(2,2);
-2*s1*CxxmCxzCzziCzx -CxzCzzi];
# ---
ds3 = @views D0 \ (dAds * dropdims(D0[:,[N1 N2]], dims = (findall(size(D0[:,[N1 N2]]) .== 1)...,))); # Drop singleton dimensions, otherwise we get a [4x1x2] matrix
ds31 = @views ds3[N1,1];
ds32 = @views ds3[N2,2];
return ds31,ds32
end
# --- pairwise minimum
function pairwisemin(s3,l3)
mins,idx = findmin(abs2.( repeat( l3 , 1, 2 ) - repeat(transpose(s3),2,1) ) , dims=1 );
idx = [idx[1][1] idx[2][1]];
return idx;
end
function AssignEigenvaluesEigenvectors(C0,s1,rho0,f,h,s30e,s30,CzziCzx,CxzCzzi,CxxmCxzCzziCzx,Czzi)
A0,F0 = AFmatrix(C0,s1,rho0,f,h,CzziCzx,CxzCzzi,CxxmCxzCzziCzx,Czzi);
L0,D0 = eigen(A0);
posneg0 = sign.(imag( L0./s1 ));
negidx = @views pairwisemin( s30e[1:2], L0[ posneg0.==+1 ] );
posidx = @views pairwisemin( s30e[3:4], L0[ posneg0.==-1 ] );
posneg0[posneg0.==-1]=2 .+ vec(posidx);
posneg0[posneg0.==+1]= vec(negidx);
posneg0I= round.(Int, posneg0);
s30[ posneg0I] = (L0);
D0[:,posneg0I] = (D0);
return s30,D0,F0
end
function CdH()
theta = 0;
M = BondMatrix2D(22.5)
C0 = [64 18 -4;
18 46 -2;
-4 -2 7 ]*3.1e8;
C0 = M * C0 * M';
rho0 = 2000;
C1 = 4.5*C0;
rho1 = 1.5*rho0;
# --- Decompose the matrix
CzziCzx0,CxzCzzi0,CxxmCxzCzziCzx0,Czzi0 = CMatrixDecomp(C0);
CzziCzx1,CxzCzzi1,CxxmCxzCzziCzx1,Czzi1 = CMatrixDecomp(C1);
# -------------------- Setup source details
f = [1;0]
h = [0 0; 0 0];
# -------------------- Setup receiver details
h0 = 200;
h1 = -300;
x = 10;
N0 = [3 3 4 4]; # P/ P/ S/ S/
N1 = [1 2 1 2]; # P\ S\ P\ S\
# -------------------- Setup temporal vector
ts = collect(0:2e-5:0.8);
solution1 = ts.*0;
# -------------------- Setup initial iteration details
A0,F0 = AFmatrix(C0,0,rho0,f,h,CzziCzx0,CxzCzzi0,CxxmCxzCzziCzx0,Czzi0)
L0,D0 = eigen(A0);
L0init = [-sort( -L0[ L0.<0 ] ); sort( L0[ L0.>0 ])]; # >> Sort as [-a1, -a2, a1, a2], with a1<a2.
A1,F1 = AFmatrix(C1,0,rho1,f,h,CzziCzx1,CxzCzzi1,CxxmCxzCzziCzx1,Czzi1)
L1,D1 = eigen(A1);
L1init = [-sort( -L1[ L1.<0 ] ); sort( L1[ L1.>0 ])]; # >> Sort as [-a1, -a2, a1, a2], with a1<a2.
# --- Julia-specific initializing of variables, which have to survive in global scope
Fp = 1+im;
# -------------------- Start iterating
for N = 1:4
println(N)
s1new= complex(0);
s1 = complex(0);
s30c = complex(L0init);
s31c = complex(L1init);
s30 = complex(L0init);
s31 = complex(L1init);
for ii=1:length(ts)
t=ts[ii];
if t< ( L0init[N0[N]]*h0+L0init[N1[N]]*h1 ) # = where s_1 = 0.
continue;
end
s30h = complex(s30c);
s31h = complex(s31c);
s30c = complex(s30);
s31c = complex(s31);
s30e = complex(2*s30c - s30h); # Expected s3 (eigen)values (medium 1)
s31e = complex(2*s31c - s31h); # Expected s3 (eigen)values (medium 2)
jj=0;
while (abs(s1*x+s30[N0[N]]*h0+s30[N1[N]]*h1-t )>1e-10 || jj==0) && (jj<500)
s1 = real(s1new) + im*(abs(imag(s1new)));
# --- Assign eigenvalues and eigenvectors to medium 1
s30,D0,F0 = AssignEigenvaluesEigenvectors(C0,s1+im*eps(),rho0,f,h,s30e,s30e,CzziCzx0,CxzCzzi0,CxxmCxzCzziCzx0,Czzi0);
# --- Newton-Raphson iteration
ds3ds11,ds3ds12 = ds3ds1(C0,D0,s1,N0[N],N1[N],CzziCzx0,CxzCzzi0,CxxmCxzCzziCzx0,Czzi0);
Fp = ( x + ds3ds11 * h0 + ds3ds12 * h1 );
s1new = s1 - ( s1*x + s30[N0[N]]*h0 + s30[N1[N]]*h1-t ) / Fp;
jj+=1;
end
s31,D1,F1 = AssignEigenvaluesEigenvectors(C1,s1,rho1,f,h,s31e,s31e,CzziCzx1,CxzCzzi1,CxxmCxzCzziCzx1,Czzi1);
# --- Scattering matrix
Q = D1 \ D0;
R = @views Q[1:2,1:2] \ Q[1:2,3:4];
R = R[N1[N],N0[N]-2]
DF = D0 \ F0;
DF = DF[N0[N]];
BJN = D0[:,N1[N]] * DF * R
# BJN = D0[:,N1[N]] .* ( transpose(D0I[N0[N],:]) * F0 ) * R ;
dsdt = 1/Fp;
sol = 1/pi * imag( BJN * dsdt );
solution1[ii] += cos(theta)*sol[1] - sin(theta)*sol[2];
end
display(plot(ts,solution1));
end
return solution1
end
CdH(); # >> Actually running the program.
The program supplied here takes about 35 seconds to run on my MacBook, where I use the JuliaPro with the long-term support (v1.0.5-2) version.
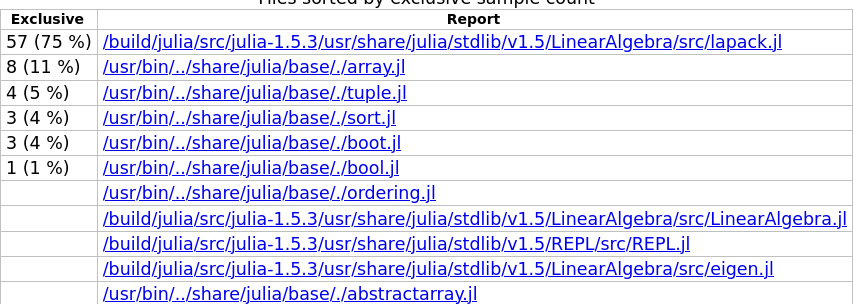
When I check the program with the profiler, it seems that the main bottleneck of the program is the L0,D0 = eigen(A0); operation, which takes about 25% of the run-time. Here, A0 is always a 4x4 complex-valued matrix. Unfortunately, the StaticArrays package doesn’t allow for this format (or at least, it gives errors for me when I then use it with the eigen function), so I don’t know if I could make this call more efficient by somehow telling Julia about what format to expect… However, I wondered if there were other ways of increasing the speed of my code. So, I went another few levels down in the profiler (please can someone confirm that I’m reading this correctly?), and see that it spends the most time computing the eigenvectors/eigenvalues in getindex(t::Tuple, r::AbstractArray{<:Any,1}) = ([t[ri] for ri in r]...,) which lives in tuple.jl. This leads to my question: is the Julia call to Eigen somehow getting stuck in collecting the results from the call to BLAS into a tuple, rather than spending time in the BLAS function itself? Does someone have a suggestion about how I can speed up my code if that is the case?
Many thanks in advance!

{kind=link}
{kind=link}