I am testing whether DiscreteCallback could be used instead of ContinuousCallback. For testing purposes I modified the ContinuousCallback bouncing ball example from the documentation: Bouncing ball ContinuousCallback example
As an alternative to the ContinuousCallback u[1]==0 I tried to change the condition to trigger when the ball position goes below 0. However, the ball passes below zero with the DiscreteCallback as it does not trigger when the condition u[1]<=0.0 is fulfilled. What is going wrong here?
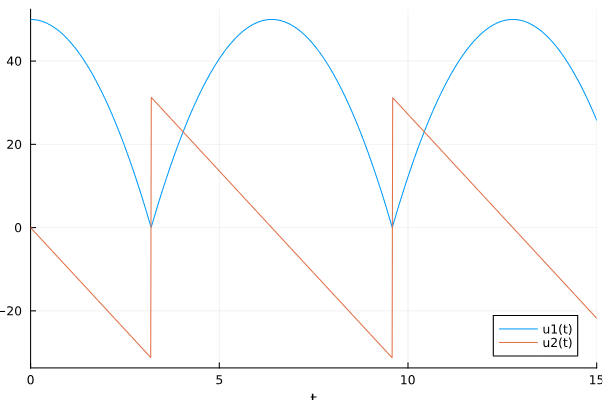
ContinuousCallback solution (correct):
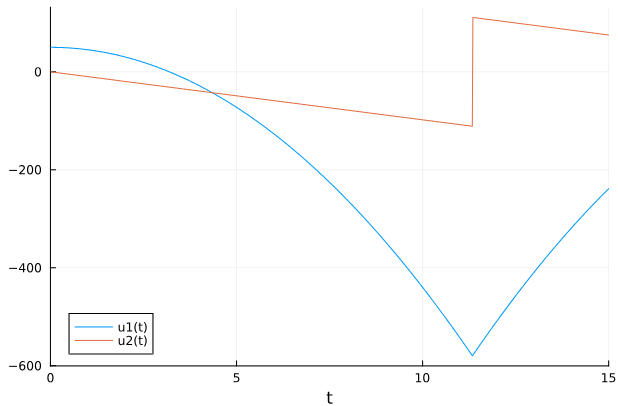
DiscreteCallback solution going below zero:
MWE:
function f(du, u, p, t)
du[1] = u[2]
du[2] = -p
end
function condition(u, t, integrator) # Event when condition(u,t,integrator) == 0
u[1]
end
function condition_d(u, t, integrator) # Event when condition(u,t,integrator) <= 0
u[1]<=0.0
end
function affect!(integrator)
integrator.u[2] = -integrator.u[2]
end
using DifferentialEquations
cb_c = ContinuousCallback(condition, affect!)
cb_d = DiscreteCallback(condition_d, affect!)
u0 = [50.0, 0.0]
tspan = (0.0, 15.0)
p = 9.8
prob = ODEProblem(f, u0, tspan, p)
sol_c = solve(prob, Tsit5(), callback = cb_c)
sol_d = solve(prob, Tsit5(), callback = cb_d)
using Plots;
plot(sol_d)
plot(sol_c)
The ContinuousCallback is applied when a given continuous condition function hits zero. This hitting can happen even within an integration step, and the solver must be able to detect it and adjust the integration step accordingly. This type of callback implements what is known in other problem-solving environments as an Event.
The DiscreteCallback is applied when its condition function is true, but the condition is only evaluated at the end of every integration step.
So for example, if you are using a fixed time step method and dt=0.1, the condition for both are checked at 0.1, 0,2, etc. For a ContinuousCallback, its event is defined by a rootfinding condition so it will find the t where it “exactly” (up to floating point error) crosses zero. So if u[1] == 0 at t = 0.23, it will step to 0.3 and then pull back to t = 0.23 to apply the event there. The DiscreteCallback is purely at the step behavior, so it will check at 0.3 and apply the affect! at 0.3.
But that means DiscreteCallback isn’t able to do things like bouncing ball? Yes, it’s a different tool for a different job. For example, let’s say you wanted to project the end of every step onto some manifold (Manifold Projection · DiffEqCallbacks.jl). “When to project” is “at the end of steps”, so the condition is just true and the affect! is the projection with a DiscreteCallback. There is no way to define this with a ContinuousCallback, you’d have to do something like “when the solution is x away from the manifold”, which is a different condition.
DiscreteCallback is for things like adding new progress bars to the solve, changing the stepping behavior, applying automated mesh refinement, and stuff like that which is not defined at an exact time but is instead a modification to the solve (or logging behavior). ContinuousCallback is for traditional “event handling”, which is defined by rootfinding functions.
If you use the wrong one for the wrong thing they will not give the behavior you need, and they have different behaviors because they serve two distinctly different purposes.
Thanks, that makes sense and explains why DiscreteCallback is not the right thing to use for my use case.
Coming back to my original problem. I am interested in solving an ODE which only evolves when two ‘larger than’ conditions are fulfilled (in pseudo code):
function ODE(du, u, p, t)
...
if f1(u,p)>=0.0 && f2()>=0.0
du[1] = g1(u,p)
du[2] = g2(u,p)
else
du[1] = 0.0
du[2] = 0.0
end
I understand this should be implemented using a ContinuousCallback(condition, affect!) as the condition could change from true to false (and vice versa) within a step. Should I formulate my ‘larger-than’ condition function for ContinuousCallback using something like 1.0-heaviside(f1)*heaviside(f2) (evaluates to 0.0 when f1>=0.0 && f2>=0.0), and in my affect! function set a boolean which is checked in the ODE? And similarly make a condition function for ‘smaller-than’ to let affect! change said boolean to false? The two conditions should be combined in a CallbackSet.
(Unfortunately, I don’t have an MWE that I can share)
Or is the heaviside problematic in the root finding of ContinuousCallback? If that’s the case I could instead let condition functions check any zero-crossing of f1 and f2 and then have an affect! function set the boolean upon which the ODE evolves accordingly.